
新型人造肌肉:更輕、更安全、更堅固的機器人
蘇黎世理工學院的研究表明,這是一項針對與人類肌肉群更相似且對與環境相互作用更敏感的肌肉群的技術
蘇黎世聯邦理工學院的研究人員最近開發了用於機器人運動的人造肌肉,但他們的解決方案比以前的技術具有多個優勢。
值得進一步研究的是,它可以用於機器人必須是柔軟的而不是剛性的或必須在與環境互動時更加敏感的所有情況。
許多機器人專家夢想建造的機器人不僅是金屬或其他硬質材料和馬達的組合,而且更柔軟、適應性更強。
「軟」機器人可能以完全不同的方式與環境互動。例如,它們可以像人類四肢一樣緩衝衝擊或巧妙地抓住物體。
這也將在能源消耗方面帶來優勢:如今,機器人的運動通常需要大量能量才能長時間保持某個位置,而軟系統可以更好地儲存能量。
那麼,還有什麼比以人體肌肉為模型並嘗試重建它更明顯的呢?
再見,NCCR Robotics:為瑞士服務整整十二年
有一架無人機會“爬”樹來保護它們

每塊自然肌肉也會響應足夠的電脈衝而收縮
人造肌肉的功能必然基於生物學。
與天然肌肉一樣,人造肌肉也會響應電脈衝而收縮。
然而,人造肌肉並非由細胞和纖維組成,而是由充滿液體(通常是油)的囊組成,其外殼部分覆蓋有電極。
當這些電極接收到電壓時,它們會聚集在一起,將液體推入液囊的其餘部分,液囊會彎曲,因此能夠舉起重物。
單一囊類似一短肌纖維束。
幾個這樣的袋子可以連接在一起形成一個完整的推進元件,也稱為執行器,或更簡單地稱為人造肌肉。
授予變形形狀軟機器人 ProteusDrone 獎
機器狗:受動物生物學啟發的瑞士發明
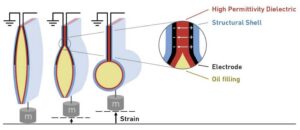
(圖:Gravert 等人/《科學》/蘇黎世聯邦理工學院)
最初靜電致動器需要 6.000 至 10.000 伏特的電壓
開發人造肌肉的想法並不新鮮,但到目前為止,其實現一直存在一個重大障礙:靜電致動器只能在極高的電壓下工作,從大約 6.000 伏特到 10.000 伏特。
這項要求產生了幾個後果:例如,肌肉必須連接到大型高電壓放大器,它們不能在水中工作,並且對人類來說並不完全安全。
現在已經開發出一種新的解決方案 羅伯特‧卡茨施曼蘇黎世聯邦理工學院機器人學教授,與 Stephan-Daniel Gravert、Elia Varini 和其他同事一起。
他們在資訊網站「科學進展」上發表了一篇關於他們的人造肌肉版本的文章,該版本實際上具有多種優點。
在羅伯特·卡茨施曼 (Robert Katzschmann) 實驗室擔任科學助理的斯蒂芬·丹尼爾·格拉弗特 (Stephan-Daniel Gravert) 為這款包設計了一種新穎的外殼。
一種新的英瑞消防無人機可以幫助消防員
因此,在瑞士,機器人“學習”徒步旅行的秘密

(照片:Gravert 等人,《科學》,2024 年)
未來的解決方案?今天它來自於高磁導率鐵電材料
研究人員將這種新型人造肌肉稱為 HALVE 致動器,其中 HALVE 代表「液壓放大低壓靜電」。
「在其他致動器中,電極位於外殼的外側。在我們的外殼中,外殼由幾層組成。我們採用了具有高磁導率(即能夠儲存相對大量電能)的鐵電材料,並將其與一層電極結合在一起。然後我們給所有東西塗上了聚合物外殼,它具有優異的機械性能,使袋子更加穩定”他解釋。
透過這種方式,研究人員能夠降低所需的電壓,因為鐵電材料的介電常數要高得多,儘管電壓較低,但仍可以實現很大的力。
Stephan-Daniel Gravert 和 Elia Varini 不僅共同開發了 HALVE 執行器的外殼,還在實驗室中自行製造了執行器,用於兩個特定的機器人。
位於特拉維夫的 Enel 實驗室致力於在能源領域使用人工智能和機器人技術
這就是 Atlas 機器人已經可以與我們工作和互動的方式
(照片:Gravert 等人的影片截圖,Science,2024)
科技「鉗子」和「魚」展示了瑞士設計的肌肉能做什麼
機器人的一個例子是一個高 11 公分、有兩個手指的抓手。
每個手指均由 HALVE 執行器的三個串聯口袋移動。
小型電池電源為機器人提供 900 伏特電壓。
電池和電源的總重量僅為 15 克。
整個卡鉗,包括動力和控制電子設備,重量為 45 磅。
當用繩子將物體提升到空中時,夾具可以用足夠的力夾持光滑的塑膠物體以支撐其自身重量。
「這個例子很好地展示了 HALVE 執行器的小巧、輕巧和高效能。這也意味著我們朝著創建整合肌肉驅動系統的目標邁出了一大步。””,卡茲施曼滿意地說。
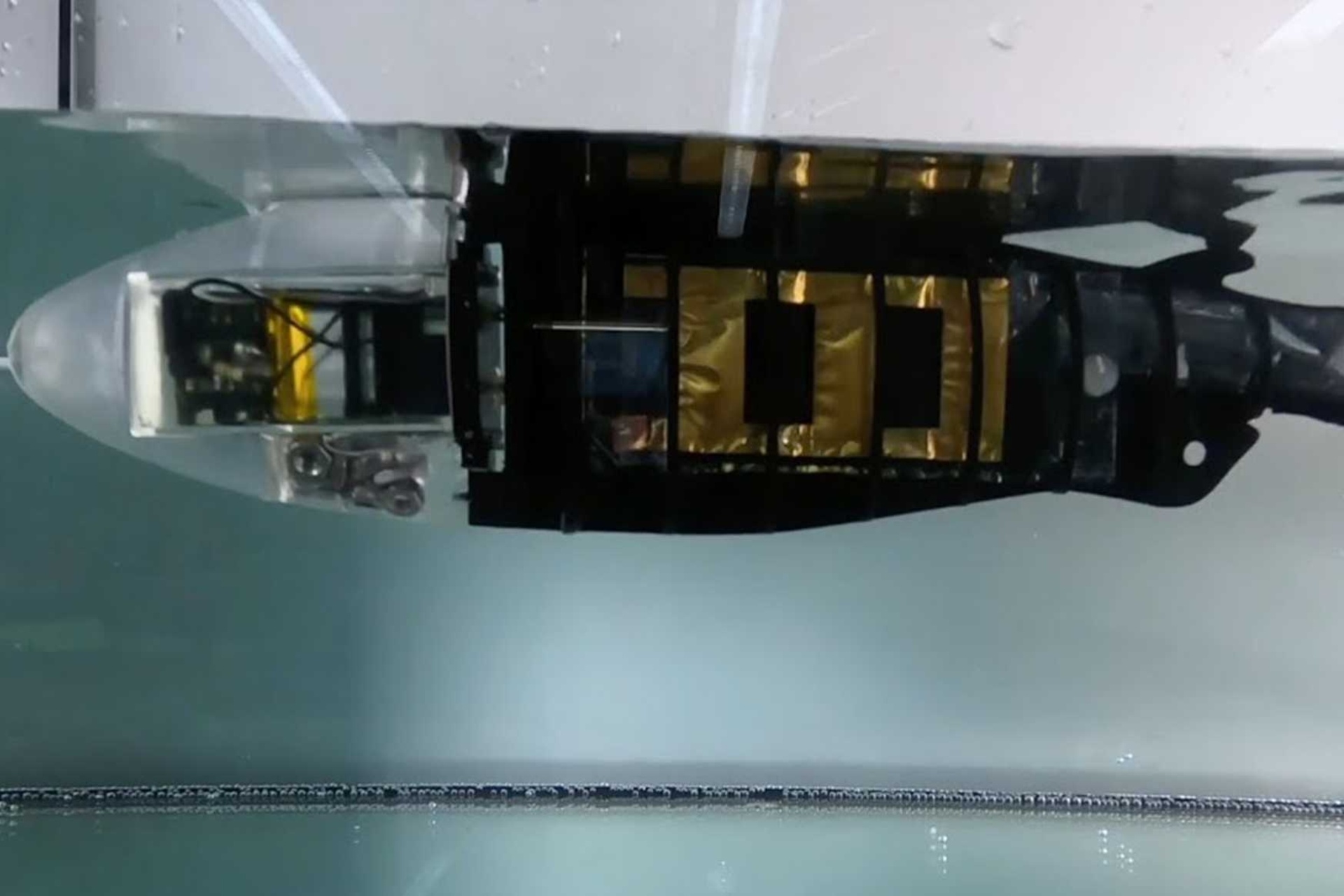
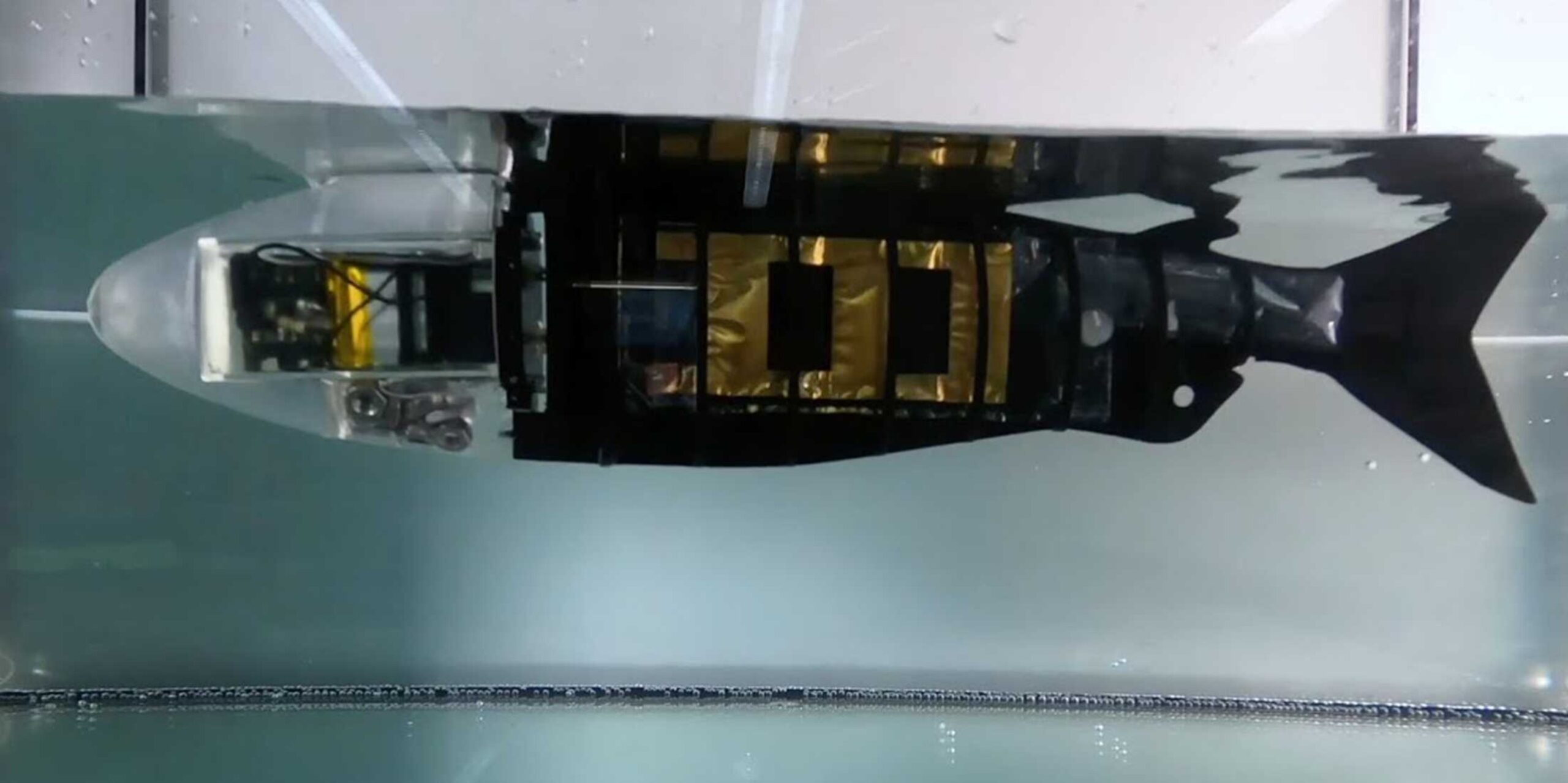
第二個物體是像魚一樣的游泳者,長近30厘米,能夠在水中輕鬆移動。
它由一個包含電子設備的“頭部”和一個靈活的“身體”組成,“身體”連接著“液壓放大低壓靜電”執行器。
這些執行器以產生典型游泳運動的節奏交替移動。
自主魚可以在14秒內以每秒三公分的速度從靜止脫離,而這一切都浸入普通自來水中。
機器狗:受動物生物學啟發的瑞士發明
瑞士聯邦理工學院致力於透明且可靠的人工智慧

新的執行器比其他人造肌肉更堅固且防水
第二個範例很重要,因為它示範了 HALVE 致動器的另一個新功能。
由於電極不再受到外殼的保護,人造肌肉現在是防水的,甚至可以浸入導電液體中使用。
「這條魚說明了這些致動器的一般優點:電極受到保護,不受外部環境的影響,反之亦然,環境也受到電極的保護。因此,例如,您可以在水中使用這些靜電執行器或觸摸它們””,蘇黎世聯邦理工學院的教授補充道。
封套的分層結構還有另一個優點:新的致動器比其他人造肌肉更堅固。
理想情況下,信封應該能夠快速進行大量移動。
然而,即使是最小的製造錯誤,例如電極之間的一粒灰塵,也可能導致電氣故障,一種「小型雷擊」。
4 月 XNUMX 日洛桑“瑞士機器人日”
DroneHub 為無人機研究提供了前所未有的“鳥舍”

「迷你閃電」問題解決,企業準備大規模生產
「當這種情況發生在以前的型號中時,電極會燒壞,在外殼上形成一個洞。這使得液體逸出並使執行器無法使用””,史蒂芬-丹尼爾·格拉弗特解釋道。
這個問題在 HALVE 執行器中得到了解決,因為由於有保護性的外部塑膠層,單一孔基本上會自行關閉。
因此,即使在發生電氣故障後,外殼仍能保持完整功能。
兩位研究人員顯然很高興在人造肌肉的發展上取得了決定性的突破,但他們也很現實。
正如羅伯特‧卡茨施曼所說, 「現在我們必須為這項技術的大規模生產做好準備,而我們在 ETH 實驗室無法做到這一點。在不透露太多信息的情況下,我可以說我們已經收到了願意與我們合作的公司的興趣。”
例如,人造肌肉有一天可以用於新的機器人、義肢或穿戴式裝置。
換句話說,在人體內部和表面上使用的技術...



無約束夾具,由 HALVE 致動器驅動,抓取一塊 PLA
自來水中由 HALVE 執行器驅動的不受束縛的人造魚
您也可能對。。。有興趣:




 //
//